I. Introduction
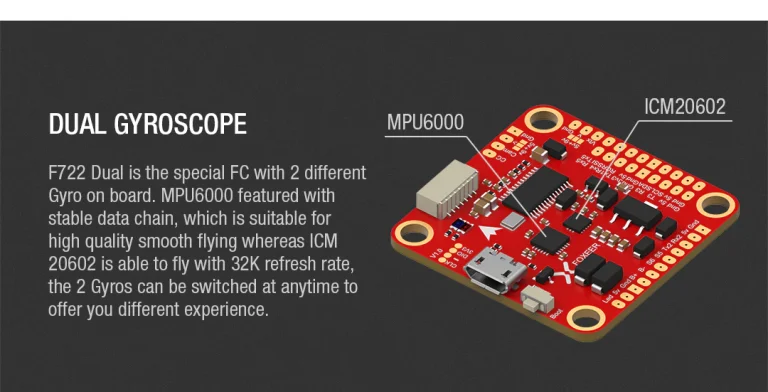
Ultramodern technology relies heavily on Inertial Measurement Units( IMUs), which allow for accurate shadowing of direction, acceleration, and angular haste. Their significance extends to a wide range of operations, similar to robotic system dexterity improvement, wearable device stir shadowing made smooth, and drone navigation via intricate pushes. Of the numerous IMUs on the request, the ICM20602 and MPU6000 stand out as two of the most popular options because of their dependable operation and rigidity for a wide range of operations that call for stir-seeking capabilities. Let’s examine these IMUs in further detail to determine their advantages and connections in different scripts.
https://www.youtube.com/watch?app=desktop&v=o__dscOot10
II. ICM20602: Overview and Features
A. Description of the ICM20602 IMU
The ICM20602 is a sophisticated Inertial Measurement Unit( IMU) developed by TDK-InvenSense. It combines a 3-axis gyroscope and a 3-axis accelerometer in a single chip, offering precise stir-seeking capabilities. Its compact size and integrated design make it suitable for colorful operations, similar to drones, virtual reality systems, and stir-shadowing bias.
B. Key features, specifications, and specialized details
The ICM20602 IMU boasts emotional, specialized specifications. It features a gyroscope with a full-scale range of ± 250, ± 500, ± 1000, or ± 2000 degrees per second(DPS), furnishing high-resolution stir shadowing. also, its accelerometer offers selectable full-scale ranges of ± 2g, ± 4g, ± 8g, or ± 16g, enabling accurate dimension of acceleration in colorful surroundings. With a digital interface supporting I2C and SPI protocols, the ICM20602 facilitates flawless integration into digital systems.
C. Advantages and strengths of the ICM20602
One of the notable advantages of the ICM20602 is its exceptional delicacy and stability, indeed in dynamic stir conditions. The detector’s advanced signal processing algorithms minimize noise and ameliorate detector emulsion performance, resulting in dependable stir tracking data. likewise, the ICM20602 offers low power consumption, making it suitable for battery-operated bias. Its robust design and wide operating temperature range ensure harmonious performance in grueling surroundings. Overall, the ICM20602 stands out as a protean and dependable result for demanding stir-seeking operations
III. MPU6000: Overview and Features
A. Description of the MPU6000
The MPU6000 is a largely regarded Inertial Measurement Unit( IMU) developed by InvenSense, now a part of TDK Corporation. It integrates a 3-axis accelerometer and a 3-axis gyroscope into a single chip, furnishing accurate stir-seeking capabilities. With its compact design and robust construction, the MPU6000 is suitable for a wide range of operations, including drones, stabilizing platforms, and stir-shadowing systems.
B. Key Features, Specifications, and Technical Details
The MPU6000 features a Digital Motion Processor( DMP) that offloads complex stir-processing tasks from the host microcontroller, reducing the computational burden on the system. It supports communication via I2C and SPI interfaces, offering flexibility for integration into colorful tackle infrastructures. Operating at low power consumption situations, the MPU6000 is capable of delivering high-performance stir-seeking while conserving energy, making it ideal for battery-powered applications.

C. Advantages and Strengths of the MPU6000
One of the crucial advantages of the MPU6000 is its exceptional delicacy and trustability in stir-seeking operations. With low-noise situations and high perceptivity, it can directly describe subtle changes in exposure and acceleration. also, the MPU6000 offers advanced features such as programmable digital pollutants and stir discovery algorithms, enhancing its versatility for different operations. Its proven track record in assiduity and wide relinquishment emphasizes its character as a reliable choice for stirring-seeing results.
IV. Comparison of ICM20602 and MPU6000
A. Side-by-side comparison of features such as delicacy, perceptivity, power consumption, and size
When comparing the ICM20602 and MPU6000, several crucial features must be considered. The ICM20602 generally boasts advanced delicacy and perceptivity situations compared to the MPU6000, making it suitable for operations such as precise stir shadowing and exposure seeing. still, it’s essential to note that the power consumption of the ICM20602 might be slightly advanced due to its enhanced performance capabilities. also, the size of both IMUs may vary slightly, with the ICM20602 potentially being further compact, making it preferable for space-constrained designs.
https://www.youtube.com/watch?app=desktop&v=UWiysMidBHM
B. Performance comparison in real-world scripts
In real-world scripts, the performance differences between the ICM20602 and MPU6000 become more apparent. The ICM20602’s superior delicacy and perceptivity restate into more precise stir data, making it ideal for operations similar to drone navigation, virtual reality systems, and inertial navigation systems. On the other hand, while the MPU6000 offers decent performance, it may parade slightly lower delicacy and perceptivity situations, which could impact the overall trustability and perfection of the system, particularly in dynamic surroundings or high-speed stir tracking scripts.
C. Differences in integration, estimation, and firmware support
Integration, estimation, and firmware support are pivotal factors to consider when choosing between the ICM20602 and MPU6000. The ICM20602 may offer further straightforward integration with existing platforms and development surroundings, thanks to comprehensive attestation and robust software support from the manufacturer. also, its advanced estimation algorithms ensure accurate detector readings right out of the box, minimizing the need for homemade estimation procedures. In discrepancy, while the MPU6000 provides acceptable integration and estimation capabilities, it may require more expansive firmware customization or estimation sweats to achieve similar performance situations, particularly in demanding operations requiring precise stir-seeking capabilities.
V. Application Considerations
A. Specific Applications
The ICM20602 excels in applications requiring high precision and accuracy, such as drone navigation systems, virtual reality (VR) headsets, and stabilizing camera gimbals. Its advanced sensor fusion algorithms enable precise motion tracking and orientation sensing, making it suitable for dynamic environments. On the other hand, the MPU6000 is well-suited for applications with lower accuracy requirements, including gaming controllers, basic motion-sensing devices, and educational robotics projects. Its simplicity and cost-effectiveness make it a popular choice for hobbyist projects and entry-level applications.
B. Project Requirements
When selecting the appropriate IMU for a project, various factors must be considered. For projects demanding superior performance and reliability, the ICM20602 may be preferred due to its higher accuracy and sensitivity. Conversely, if cost is a primary concern or if the project has basic motion sensing requirements, the MPU6000 could be a suitable choice. Additionally, project-specific factors such as size constraints, power consumption, and integration complexity should also be taken into account during the selection process.
C. Microcontroller Compatibility
Both the ICM20602 and MPU6000 are compatible with a wide range of microcontrollers and development platforms generally used in the design of embedded systems. They support standard communication interfaces similar to I2C (inter-integrated circuit) and SPI(periodic supplemental interface), allowing flawless integration with popular microcontroller families including Arduino, Raspberry Pi, and STM32. Competition with different development platforms offers inflexibility for inventors to choose the most suitable platform based on their familiarity, performance conditions, and ecosystem support.
VI. Cost Analysis
A. Comparison of pricing for both the ICM20602 and MPU6000
When comparing the pricing of the ICM20602 and MPU6000, it’s essential to consider factors such as bulk abatements, supplier character, and vacuity. While the original cost of the IMU is a significant consideration, it’s also pivotal to estimate the long-term cost counteraccusations, including conservation and support costs. Also, probing multiple suppliers and comparing prices can help ensure that you are getting a stylish deal without imbuing quality or trustability.
B. Consideration of cost-effectiveness based on features and performance
Cost-effectiveness goes beyond the initial purchase price and involves evaluating the overall value provided by the IMU. This includes assessing features such as accuracy, sensitivity, power consumption, and integration capabilities relative to the price. A more precious IMU may offer fresh features or superior performance that justify the advanced cost, eventually leading to lesser cost-effectiveness over the product’s lifecycle. Thus, it’s essential to weigh the cost against the benefits and elect the IMU that offers the stylish balance of features, performance, and price for your specific operation.
VII. Conclusion
In conclusion, both the ICM20602 and MPU6000 offer emotional features and performance in the realm of inertial dimension units( IMUs). Each IMU has its strengths and advantages, according to different design conditions and operation scripts. The ICM20602 stands out with its superior delicacy and perceptivity, making it suitable for operations demanding precise stir shadowing and control. On the other hand, the MPU6000 excels in its robustness and trustability, particularly in harsh surroundings or high-vibration settings. Eventually, the choice between the two IMUs depends on factors such as design specifications, budget constraints, and integration considerations. Experimenters and inventors are encouraged to conduct thorough evaluations and testing to determine the most suitable IMU for their specific design requirements.